



ПБР10А-А.RS.ETH пускатель бесконтактный реверсивный
ПБР10А-А.RS.ETH пускатель бесконтактный реверсивный

Прибор представляет собой многофункциональный полупроводниковый пускатель с микропроцессорным управлением, предназначенный для управления и защиты электрических исполнительных механизмов регулирующей, запорно-регулирующей и запорной арматуры,
Для заказа вы можете позвонить по номеру: 8(800)550-67-06
Воспользуйтесь email почтой для заказа: info@owen-kapo.ru
Прибор представляет собой многофункциональный полупроводниковый пускатель с микропроцессорным управлением, предназначенный для управления и защиты электрических исполнительных механизмов регулирующей, запорно-регулирующей и запорной арматуры, которые имеют в своем составе трехфазные асинхронные или синхронные двигатели с напряжением питания 3×400 В или 3×230 В либо однофазные конденсаторные двигатели переменного тока с напряжением питания 230 В.
Преимущества
- OLED-дисплей с понятной индикацией.
- Компактный корпус.
- Несколько интерфейсов для управления (AI, DI, RS-485, Ethernet).
- Сохранение журнала событий.
- Разделение уровня доступов в меню.
- USB-порт для настройки пускателя.
Основные параметры
| Параметр | Характеристика |
| Напряжение питания двигателя |
|
| Номинальный ток двигателя | До 10 А |
| Пуск | Плавный пуск с байпасными реле (время пуска 100 мс) |
| Управление |
|
| Степень защиты корпуса | IP20 |
Примеры применения
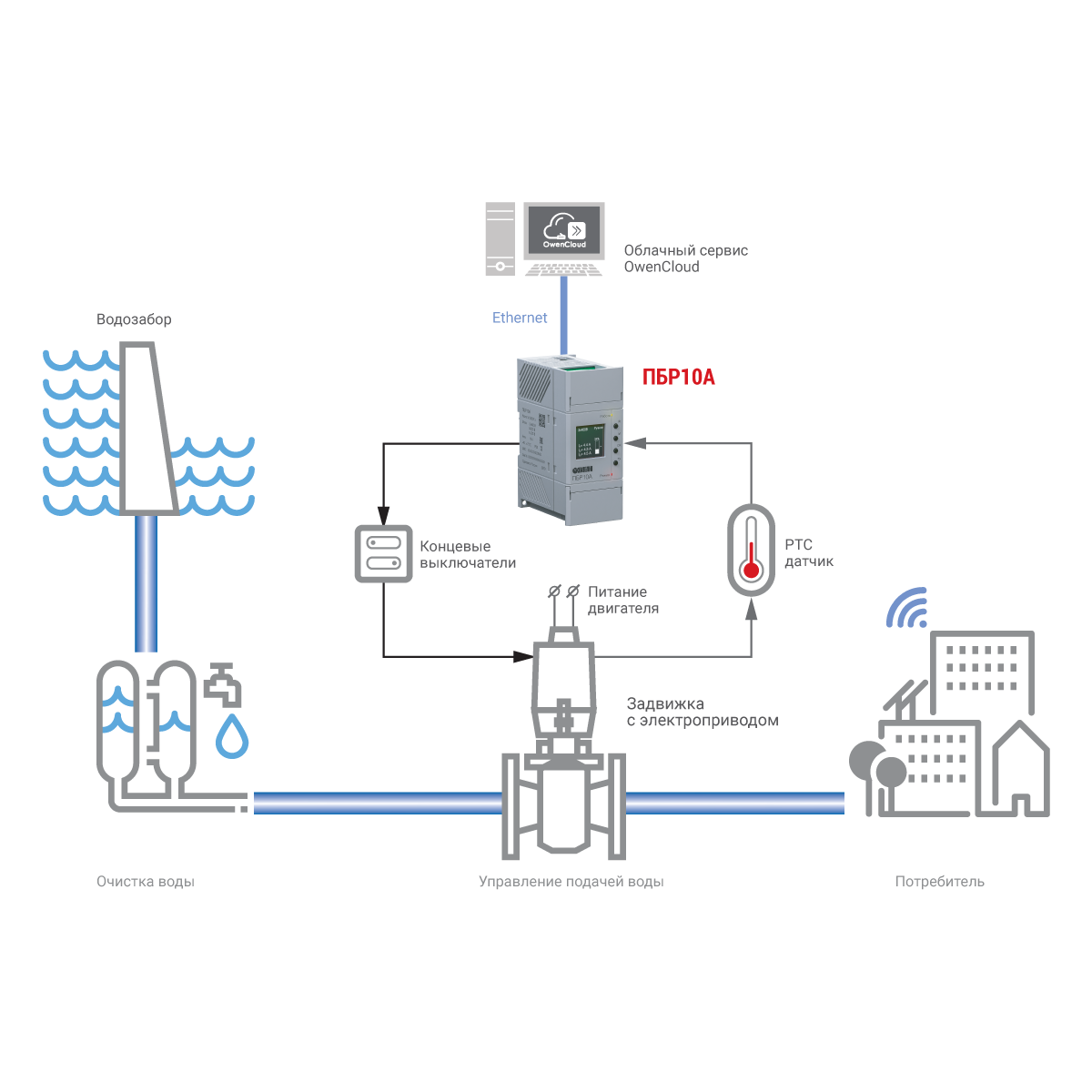

Принцип работы
При получении команд на изменение положения арматуры прибор определяет необходимое направление движения арматуры и соответствующим образом коммутирует реле реверса. Далее производится плавный пуск электродвигателя арматуры посредством изменения угла управления силовыми симисторами (время пуска 100 мс). После разгона электродвигателя подключаются байпасные реле и переводят двигатель на работу от сети для снижения тепловых потерь в приборе. При достижении арматурой требуемого положения напряжение с электродвигателя снимается, и арматура останавливается. Положение арматуры контролируется по концевым выключателям и времени или по аналоговому датчику положения.
